E Deus disse “façam-se os bits” e assim surgiu a Eletrônica Digital!
Parte VIII – Sinais digitais
Nest post tecerei algumas considerações sobre sinais digitais e algumas nomenclaturas usadas nos manuais e data sheets.
Abordarei também questões importantes para a reparação para as quais os técnicos devem ficar sempre atentos.
Já sabemos que um sinal digital é composto por níveis lógicos que são os binários 1 e 0 e em eletrônica são conhecidos como “alto” (high) e “baixo” (low).
Isto tudo no “mundo” da teoria, porém na prática estes sinais que, às vezes, são chamados de pulsos ou trem de pulsos serão expressos por valores de tensão.
Se trabalhamos com a lógica TTL estes valores, como já vimos, serão 0 e 5VDC.
Vejamos as figuras a seguir para entender o que se define como um “pulso” e algumas nomenclaturas.
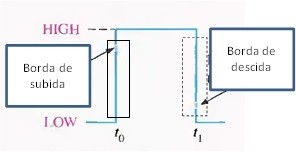
Pulso positivo
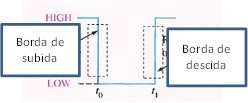
Pulso negativo
Observe que eles podem ser de dois tipos: positivo e negativo. Creio que as figuras sejam autoexplicativas, mas me parece pertinente chamar a sua atenção para dois termos que nelas aparecem: borda de subida (rising ou lending edge) e borda de descida (falling ou trailing edge). Preocupei-me em colocar entre parênteses os termos em inglês, pois é assim que aparecem nos manuais, então é bom se acostumar com eles.
Na verdade estes desenhos representam pulsos “teóricos” e jamais serão vistos nos circuitos (com o osciloscópio) com esta conformação tão precisa como numa escada que passa “instantaneamente” de um degrau (nível) para outro.
Como ficam os pulsos na prática?
As placas dos circuitos eletrônicos não são feitas apenas dos componentes que estão lá visíveis aos seus olhos.
Aliás, não só nas placas eletrônicas isto acontece. Já dizia Shakespeare: – “Existem mais coisas entre o Céu e a Terra do que sonha nossa vã filosofia.”.
Nas chamadas PCIs também existem “mais coisas nelas entre os componentes que lá estão e o que seus olhos veem”.
Que “coisas” são estas? São as capacitâncias e indutâncias distribuídas ou parasíticas.
E, se estes “duendes” da eletrônica já incomodavam no tempo dos circuitos analógicos e até valvulados, na era dos digitais e dos micro chips eles ficaram mais “agressivos”.
Mas não serão apenas estes “duendes” que irão “mexer” com a configuração dos pulsos, há também a questão do tempo de chaveamento dos semicondutores envolvidos tais como diodos, transistores bipolares e mosfets.
Na prática o pulso fica com o formato mostrado abaixo.
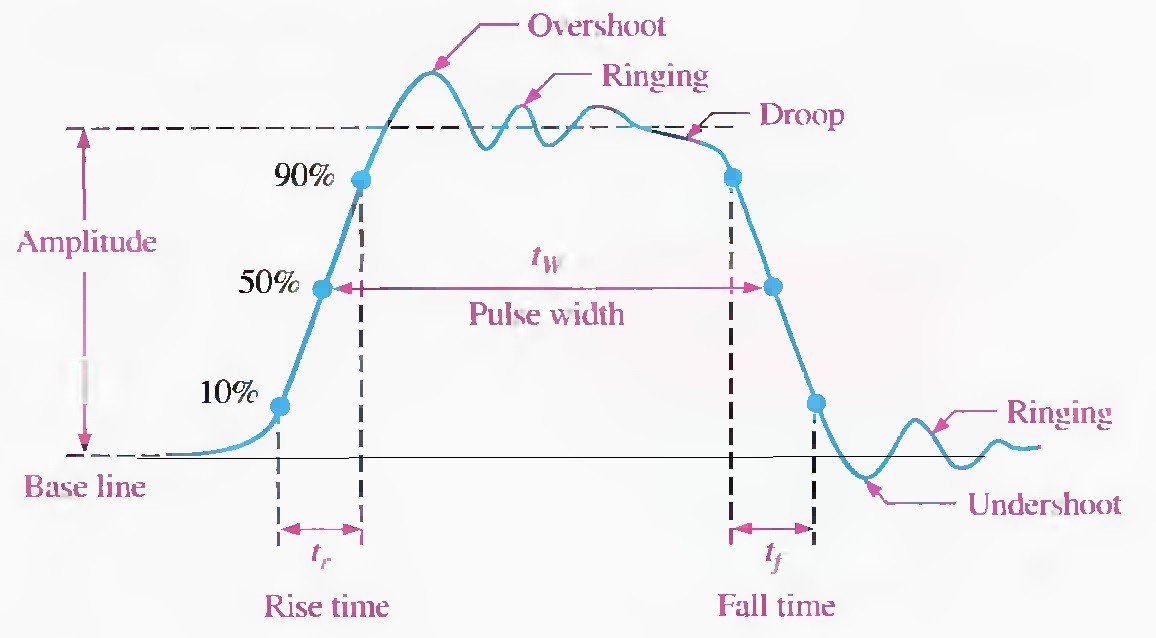
Pulso “verdadeiro”
Você deve estar notando que todos os termos estão em inglês e eu deixei de propósito, pois será assim que você irá vê-los escrito nos manuais, portanto vá se acostumando com eles.
Vamos destrinchar um pouco esta figura não só quanto à tradução dos termos, mas também quanto ao significado deles.
Do lado esquerdo temos a borda de subida que como você vê não é perfeitamente vertical como no pulso ideal.
O intervalo de tempo entre 10% após iniciar a subida e 90% antes de terminar está indicado na figura como tr e denominado rise time cuja tradução é tempo de subida.
Na borda de descida que aparece a direita temos o tf que significa fall time, ou seja, tempo de descida.
Em geral, estes dois tempos são indicados em milissegundos ou nanosegundos e quanto menor os valores significa que a borda de subida ou descida tende a ser mais vertical, ou seja, se aproxima do ideal.
Novamente insisto que você deve ser acostumar com esta nomenclatura porque ela será importante na hora de tentar analisar as especificações de um diodo, um transistor bipolar ou um mosfets.
Sobre este assunto eu farei um post especifico oportunamente.
Para a largura do pulso (tw) consideramos o tempo a 50% entre a base e o topo. Em inglês este tempo é chamado wide time e representa o tempo da largura do pulso.
Finalmente temos o topo do pulso que não é plano como no pulso ideal lembrando nossas ruas e estradas, cheias de calombos.
Um dos “calombos” lembra um quebra-molas e é chamado de overshoot. O outro “calombo” é formado por ligeiras ondulações conhecidas como ringing e finalmente podemos ter uma depressão chamada droop.
Os overhoots e ringings podem ser produzidos por efeitos indutivos e também capacitivos.
Alguns destes efeitos indesejáveis no pulso podem ser “naturais” do circuito, ou seja, nasceram com ele e o projetista não conseguiu se livrar deles.
O problema é quando “de repente” estas anomalias aparecem e começam a provocar o mau funcionamento do que aparelho.
Uma das principais causas está ligada ao aumento da ESR dos capacitores eletrolíticos como já tratei num post sobre o assunto.
As colas utilizadas, por alguns fabricantes, em alguns pontos do circuito formam outro tipo de “erva daninha”, pois com o tempo sua estrutura química se modifica introduzindo capacitâncias e indutâncias “invisíveis”, mas que podem “bagunçar” os sinais digitais.
Uma recomendação: – pelo sim pelo não, é sempre bom retirá-las mesmo que a causa do defeito que você está reparando não tenha relação com elas. Você garante o seu futuro!
As formas de ondas digitais
Quando lidamos com portas lógicas os sinais digitais, em geral, são níveis discretos, alto e baixo, que podem ser verificados, preferencialmente, por uma ponta lógica. Um exemplo, típico é o sinal de reset dos micro controladores que é um pulso que muda de estado em um intervalo de tempo da ordem de micro segundos. O multímetro, principalmente o digital, não é capaz de detectar está mudança. E é justamente a transição de um nível para outro que faz o reset.
No mundo digital existem outros sinais além dos pulsos que são chamados de trem de pulsos que são formas de onda que podem ser periódicas ou não periódicas.
Uma forma de onda periódica é aquele em que os pulsos que a formam se repetem em intervalos de tempo fixos dominados período e é representado pela letra T (maiúscula).
Um exemplo bem conhecido de uma onda digital periódica é o sinal de clock indispensável a todo micro controlador.
Este sinal só pode ser verificado com auxílio de um osciloscópio ou um frequencímetro.
A forma de onda não periódica, como o próprio nome diz, não possui um período, ou seja, os pulsos não se repetem em intervalos de tempo bem definidos.
Um exemplo de uma onda não periódica é o sinal de dados entre o micro controlador e a memória eeprom.
Este sinal só pode ser verificado com o osciloscópio já que, não sendo periódico não poder detectado pelo frequencímetro.
Neste caso a ponta lógica também poderá identificar a existência do sinal.
O que é duty cycle?
Este é um outro termo comumente usado em circuitos digitais e que muita gente tem dúvidas sobre o seu significado embora seja algo bem simples.
Quando se fala em sinal digital periódico a primeira coisa que vem a cabeça é a onda quadrada que além de ser uma onda periódica é simétrica.
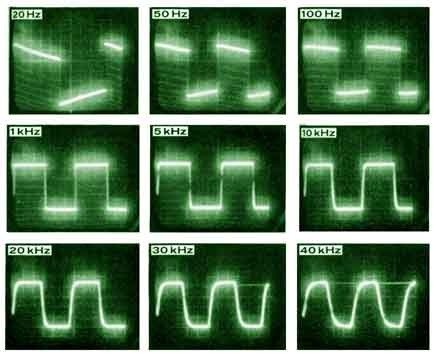
Onda quadrada de diversas frequências
Entretanto, podemos ter sinais periódicos que não são simétricos, ou seja, o intervalo de tempo em que o sinal fica em nível alto é diferente do intervalo de tempo de nível baixo.
Sinal digital não periódico
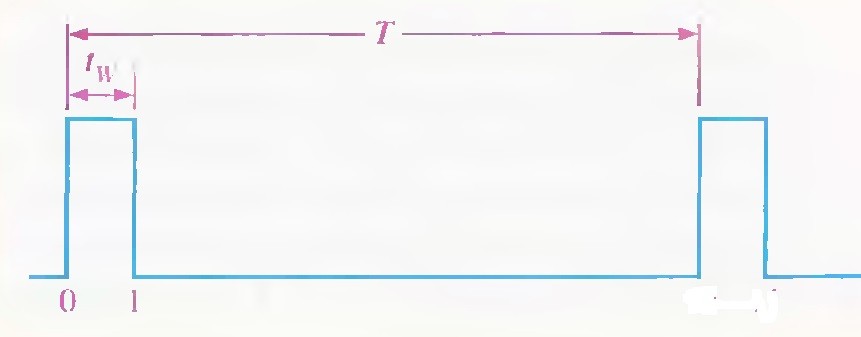
Neste caso utiliza-se, preferencialmente, o conceito de duty cycleou ciclo de trabalho que é o percentual entre o tempo em que a onda fica alta (tw) e o seu período (T).
Vejamos um exemplo. Suponhamos que na onda acima o período seja T= 20 ms e o tw = 1 ms.
O duty cycle será (tw/T) x 100% = (1/20) x100% = 5% o que significa que a onda fica 5% do tempo alta e 95% baixa.
No caso de uma onda quadrada o duty cycle é 50% por que onda fica metade do tempo alta e a outra metade baixa.
Medindo um trem de pulsos com um multímetro
Como já foi dito o multímetro não é o instrumento adequado para se medir sinais digitais, mas em alguns casos pode até “quebrar o galho”.
Imagine que você tenha uma onda quadrada que varie entre 0 e 5V e de frequência da ordem de 1kHz.
Se você utilizar um multímetro na escala DC para medir esta onda o valor lido deverá ser 2,5V. Você saberia responder por quê?
Uma onda quadrada tem um duty cycle de 50% o que significa que ela fica 50% em nível alto (5V) e 50% em nível baixo (0V). O multímetro irá medir a média entre estes dois valores que no caso é 2,5V.
Aqui cabe um cuidado. Se a frequência for muito alta o multímetro não conseguirá acompanhar a transição e medirá como 5V.
Agora imagine uma onda também de 1kHz, o que corresponde a um período (T) igual a 1mili segundo, mas com duty cycle de 5% como no exemplo anterior.
Então está onda permanecerá em nível alto (5V) apenas 0,05 mili segundos e o restante do tempo (0,95 mili segundos) ficará em nível baixo (0V). Se você for medir está onda com um multímetro encontrará apenas 0,25V.
Moral da história
Se você sabe o valor duty cycle basta multiplicá-lo pelo valor do nível alto e saberá quanto o multímetro irá medir, mas lembre-se dependendo da frequência e do multímetro ele poderá não efetuar a leitura corretamente.
Por exemplo, um duty cycle de 20% corresponde a 20/100 = 0,2 que multiplicado por 5V dará 1V e este será o valor medido pelo multímetro.
Percebeu porque é importante o conceito de duty cycle?
Apresentei neste post conceitos importantes da Eletrônica Digital e que, geralmente, não são abordados em muitos livros do assunto.
Espero que lhe sejam úteis. Continuo aberto às suas críticas e sugestões.
Até sempre



2 Comentários